
Allen George Philip
PhD Candidate
Department of Mechanical Engineering
Texas A&M University
Autonomous Systems Lab
Research Projects
C*: A New Bounding Approach for the Moving-Target Traveling Salesman Problem
A new framework that provides optimality guarantees for moving-target traveling salesman problems with generic target trajectories.
2025 IEEE Transactions on Robotics (T-R0 2025)
A Mixed-Integer Conic Program for the Moving-Target Traveling Salesman Problem based on a Graph of Convex Sets
A new formulation that finds the optimum for moving-target traveling salesman problems with linear target trajectories.
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)
A Mixed-Integer Conic Program for the Multi-Agent Moving-Target Traveling Salesman Problem
A new formulation that finds the optimum for moving-target traveling salesman problems with multiple agents and piecewise-linear target trajectories.
2025 IEEE 21st International Conference on Automation Science and Engineering (CASE 2025)
CB-GCS: Conflict-Based Search on the Graph of Convex Sets for Multi-Agent Motion Planning
A new approach for multi-agent motion planning in continuous workspaces.
2025 IEEE 21st International Conference on Automation Science and Engineering (CASE 2025)
Other Projects
Dynamics and Control of an All-Wheel-Steer Racecar
Mathematical modeling of an all-wheel-steer racecar's dynamics, and the design of its controller, using Dymola.
ROS Gmapping SLAM: Accuracy Analysis Under Lidar Noise Variations

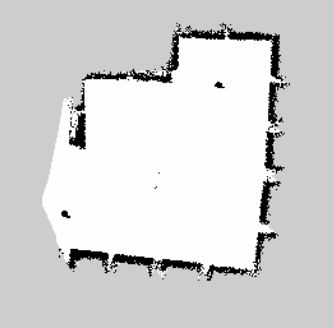
The performance of the ROS Gmapping SLAM package under varying levels of simulated Lidar noise is analyzed. By introducing different noise profiles, the impact on map accuracy and localization is evaluated, providing insights into the robustness of Gmapping in real-world scenarios with sensor imperfections.
Multi-Depot UAV Routing
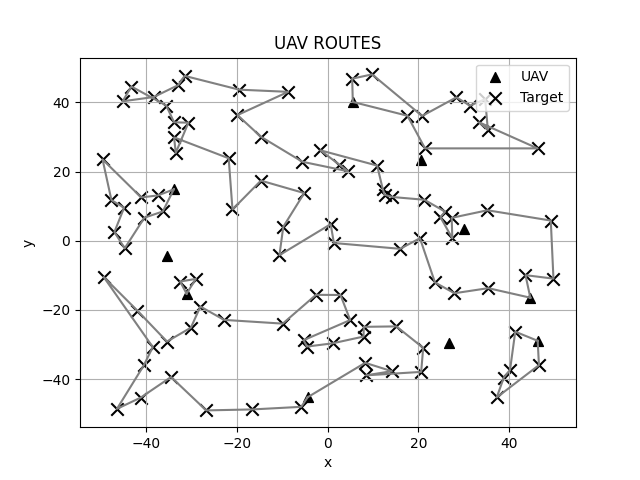
A heuristic solver that routes multiple UAVs to visit a set of target locations.
Graph-Labeling Optimizer
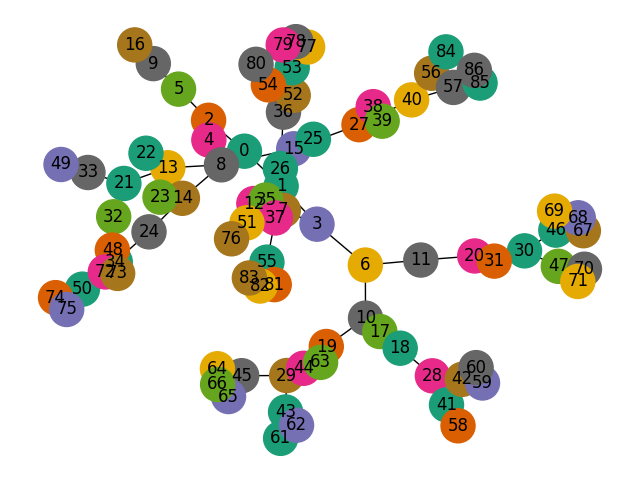
A toolkit for solving and visualizing node labeling problems on trees.
Graph Quest
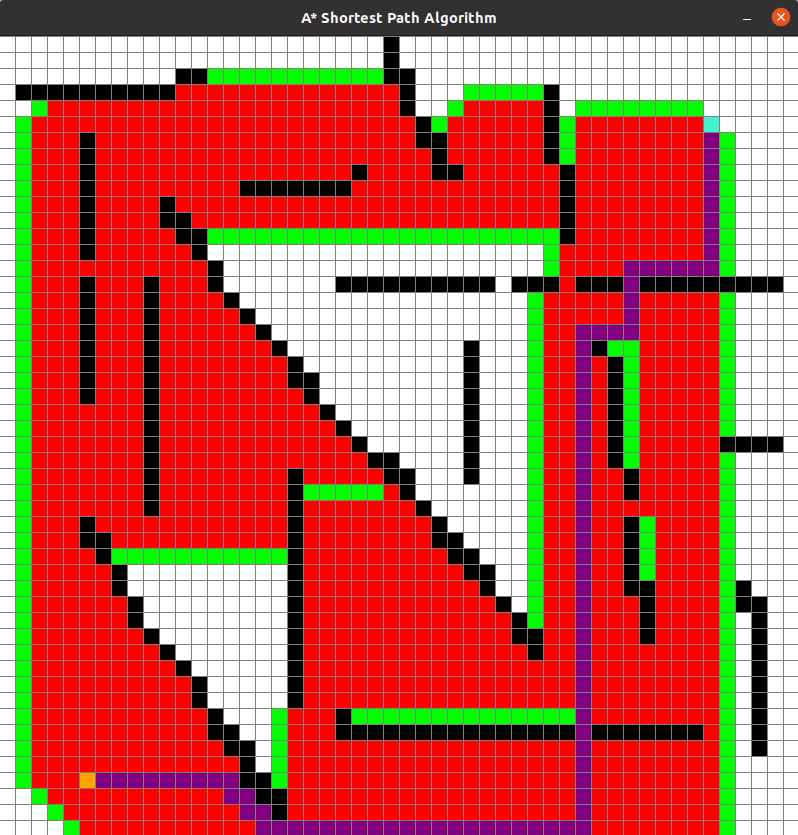

A visual journey through graph algorithms. Build your own graph instances in an interactive grid world. Visualize how classic algorithms like Kruskal’s, Dijkstra’s, A*, and Depth-First Search solve them in real time.